
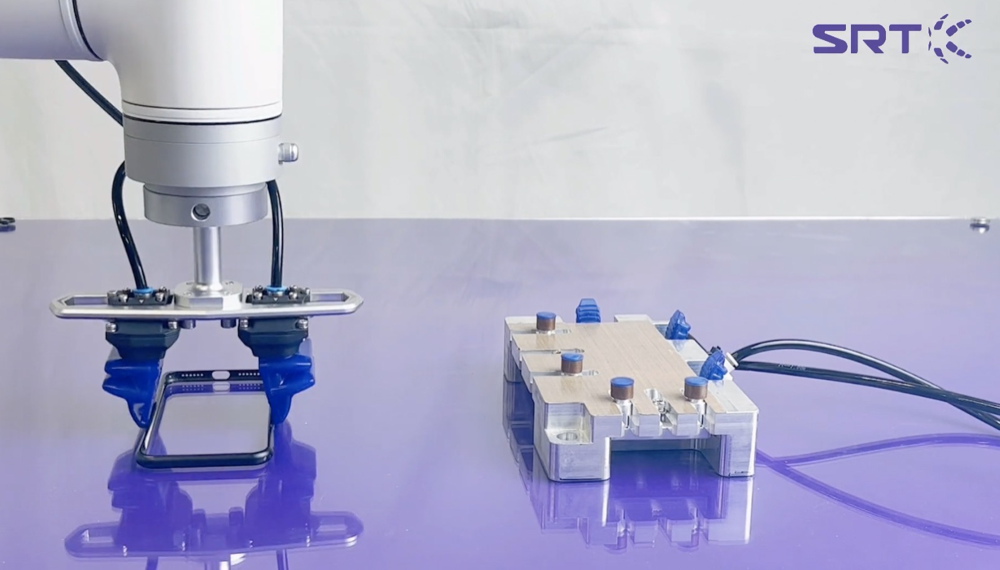
フレキシブル製造工程において、フレキシブルハンドの把持精度は生産効率に影響を与える重要な要素です。srtフレキシブルインテリジェントソリューションは、多種多様、マルチプロセス、高精度のワークピースの自動生産を実現し、フレキシブルハンドの把持精度を向上させるのに役立ちます。
マッチング高精度フレキシブル制御機構
柔性控制机构的精度值会影响末端夹具的抓取精度。为了提高柔性夹具精确夹持,需采用高精度机械臂做配套应用,这是提升柔性夹具抓取精度的基础条件。
フレキシブル制御機構の精度値は、エンドクランプの把持精度に影響します。 フレキシブルハンドの正確なクランプを向上させるためには、フレキシブルハンドの把持精度を向上させるための基本条件である高精度ロボットアームを支持用途として使用する必要があります。
適用するエンドクランプを選択してください
生産ラインのスペースや把持物の材質やサイズに応じて、生産ラインの効率的な生産を実現するために特別に装備されたエンドフィクスチャが選択されます。
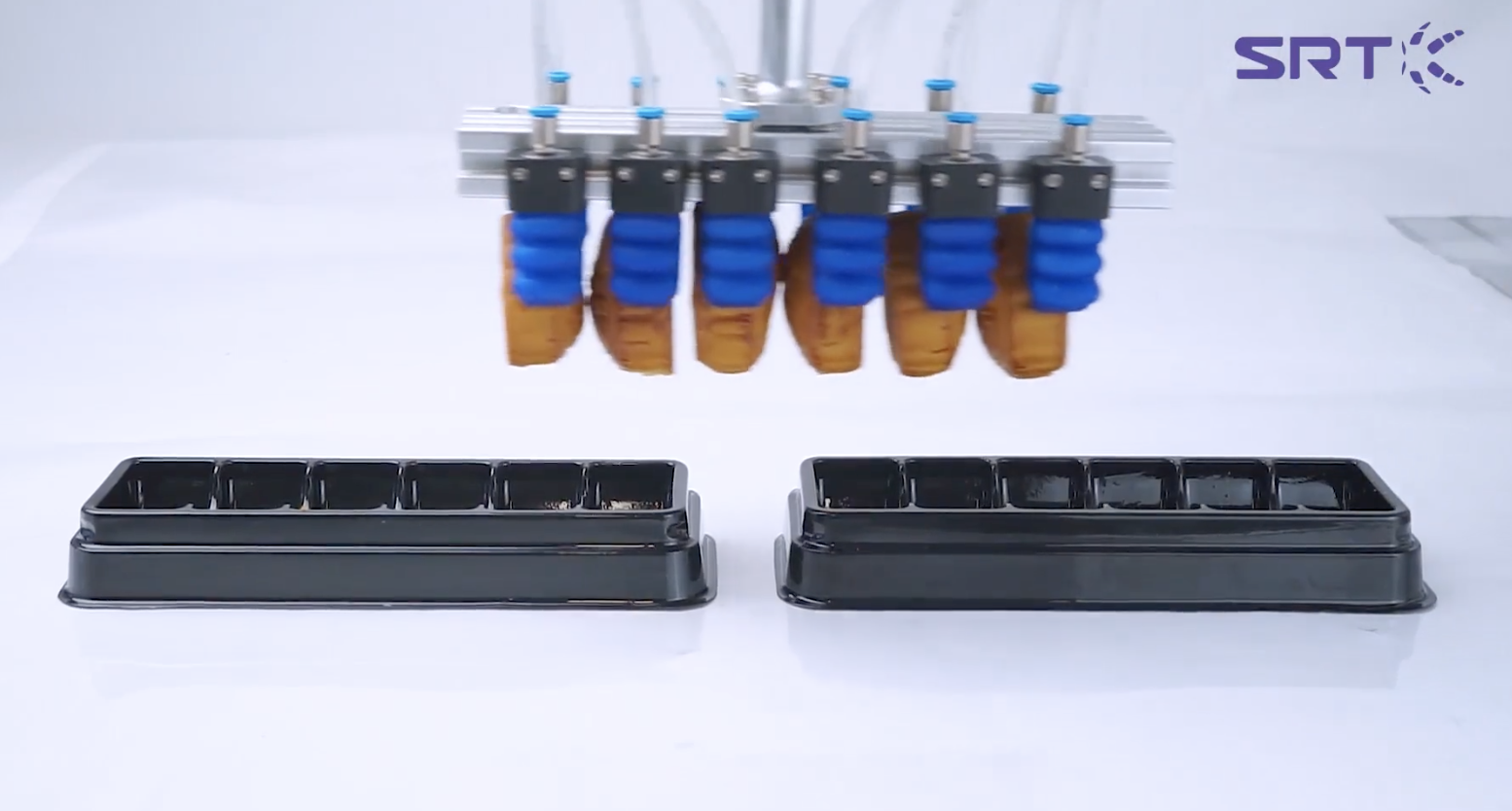
•コンパクトに配置された精密な特殊形状の物体には、msfマイクロフィクスチャを選択できます。柔軟なモジュールが小さいため、アレイの配置や狭いスペースで精密な物体をつかむ問題を解決できます。
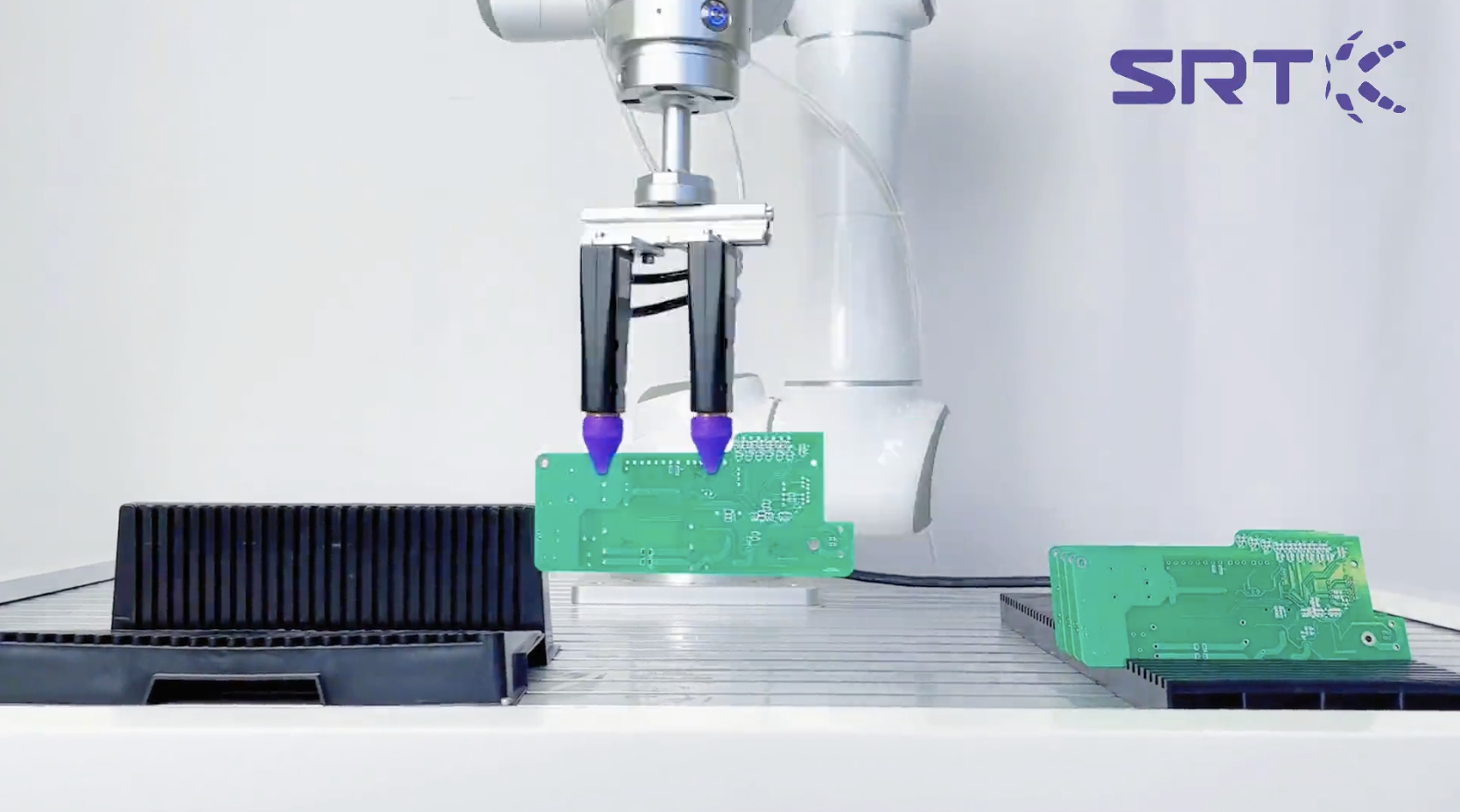
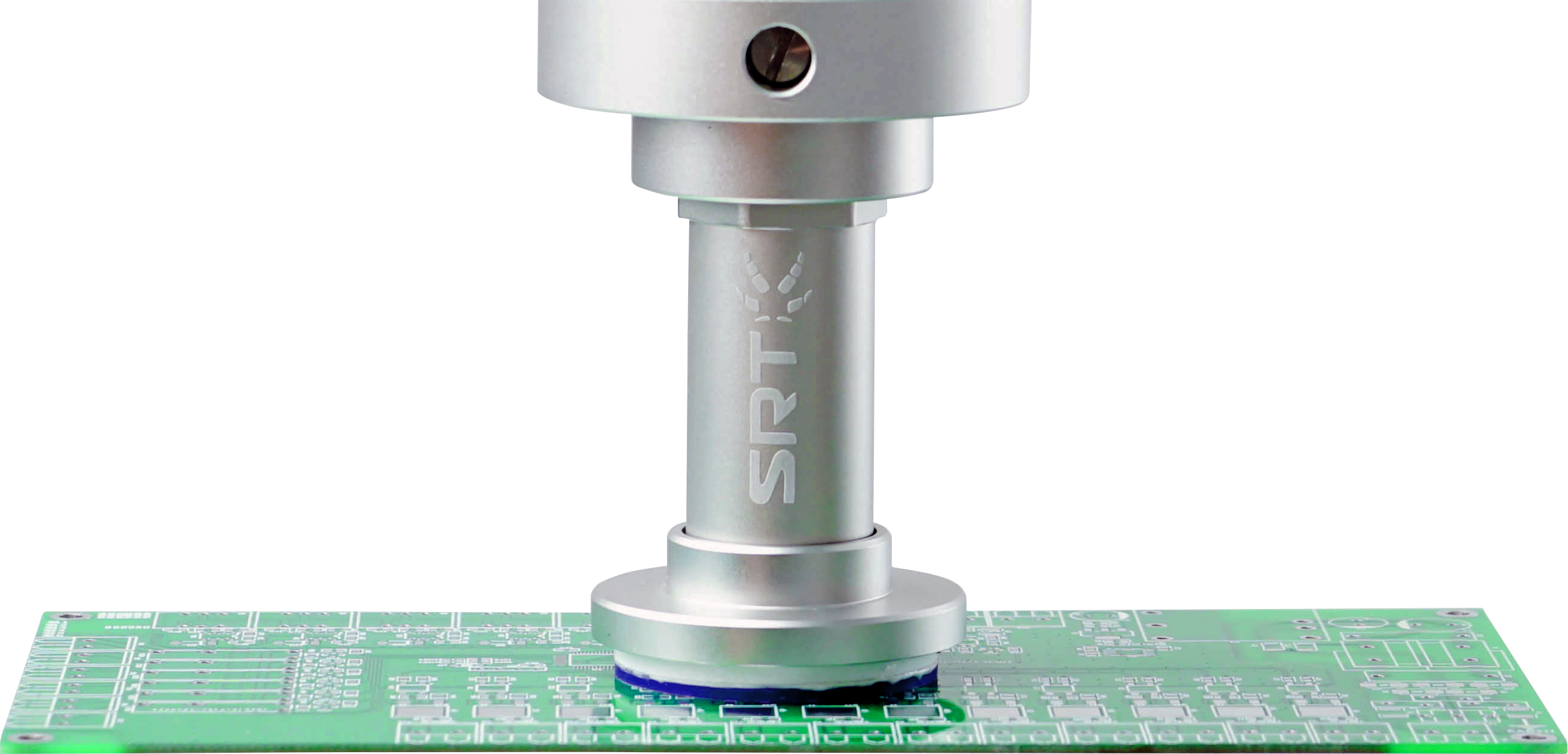
•vfcシリーズのファンデルワールス吸盤は、板紙、ガラス、回路基板、金属、プラスチック、および滑らかなパッケージの取り扱いに最適です。その接触面は何百万もの繊維状の束でできており、跡を残すことなくワークの表面にしっかりと接着することができます。

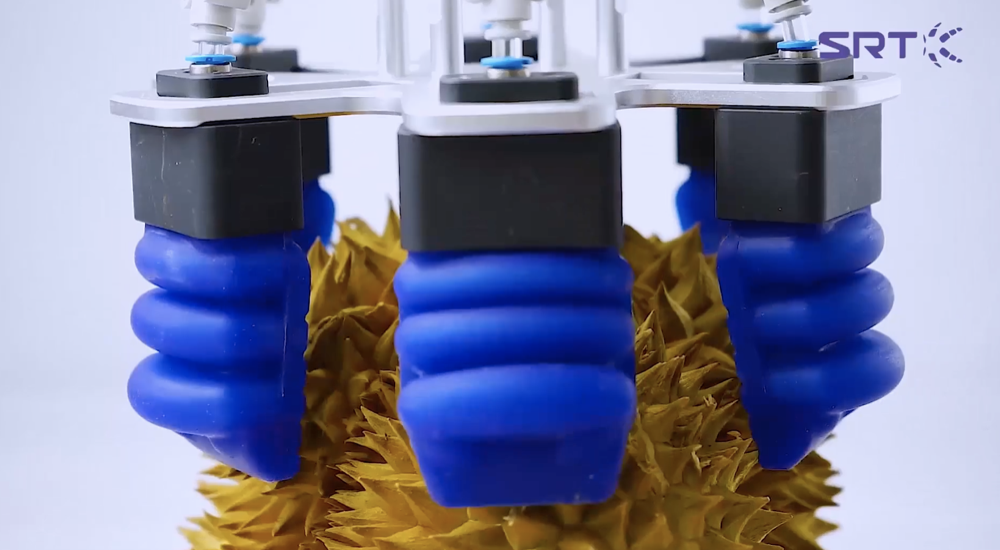
•かさばるまたは重い材料の場合は、srtのsfg-nシリーズフレキシブルグリッパーを選択できます。これにより、過酷な条件下での負荷作業とグリップ範囲を処理するための設計が追加され、グリッププロセスは安全で信頼性が高くなります。
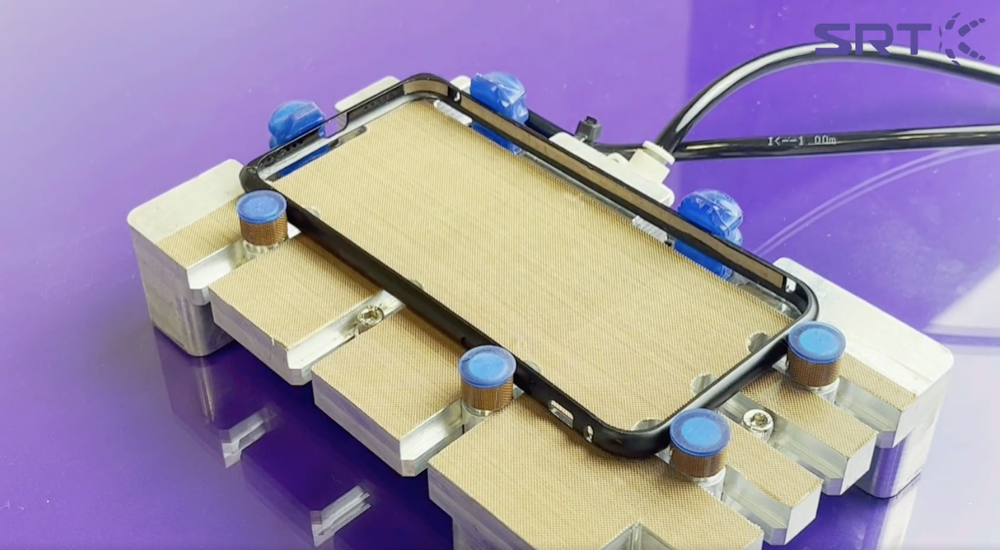
最適化されたフィクスチャ位置決めスキーム
•把持精度が厳しい作業環境では、フレキシブルハンドの正確な動作を確保するために、位置決め用の専用治具を追加して把持位置を固定することができます。
•グラブと配置のプロセスでは、配置ポイントを配置面に合わせて調整する必要があります。これにより、グラブされたオブジェクトが高地から投げ出され、グラブの精度に影響を与える現象を回避できます。
空気圧値を合理的に調整する
把持する物体の材質や形状に応じて、適切な空気圧を調整して指の把持力を制御する必要があります。柔らかいものを握るときは、握る精度を確保するために適切な空気圧値を調整する必要があります。
